Differential Slider-Arm
A lightweight differential mechanism I built to learn more about optimal control and system identification.
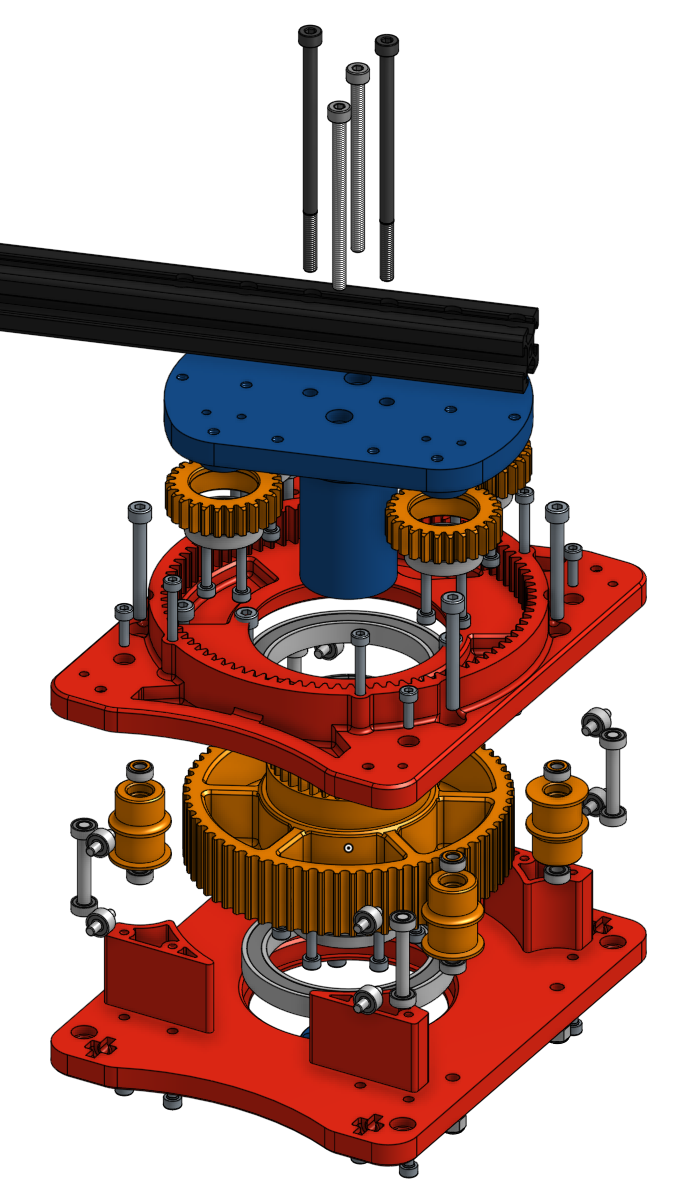
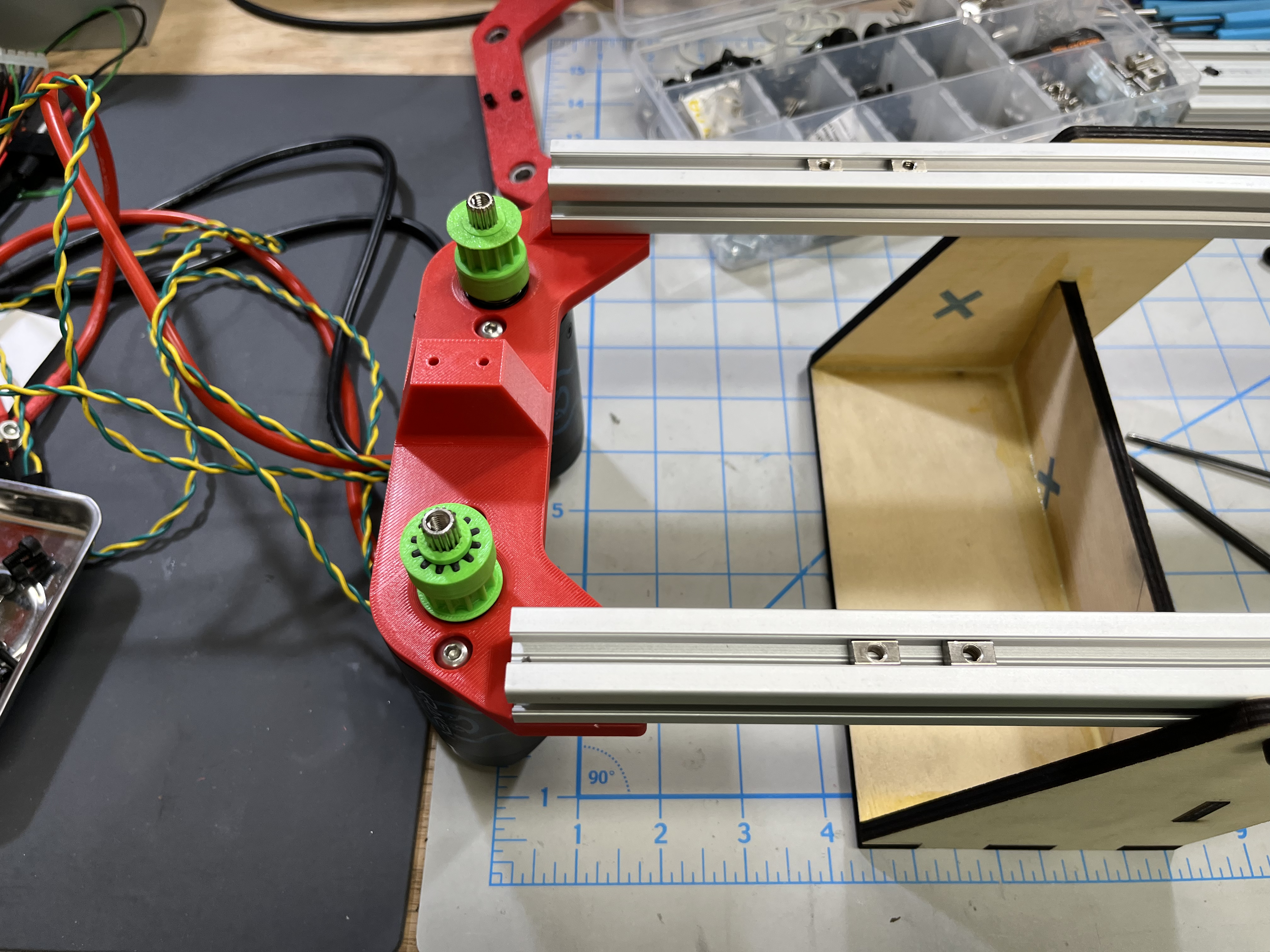
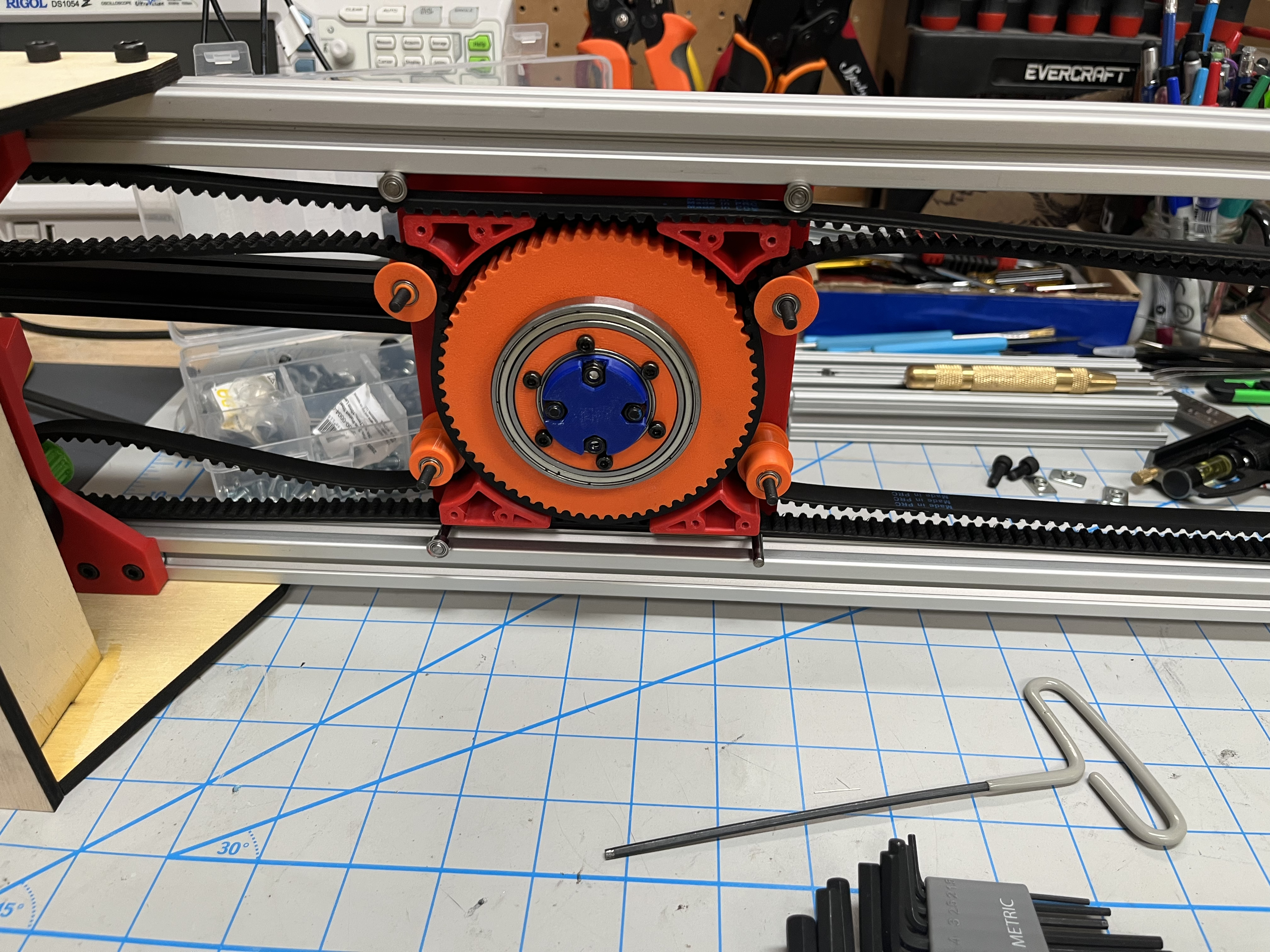
The mechanism is driven by two Kraken X44 brushless motors in a differential configuration where spinning both motors the same direction rotates the arm, and spinning them in opposite directions slides the gantry. This is accomplished with two 2-meter long HTD belts directly driven by the motors. For more rotational torque on the arm, the gantry integrates a low backlash 3D printed single stage planetary gearbox. The slider bearing blocks and ring gear are integrated resulting in a very low part count.
Gallery

Videos
System identification - a great showcase of how terrifyingly fast this thing can accelerate, this is only stepping at 5V rather than the 12V or 24V I run it at…