My Projects: Past, Present & Future
-
BLDC Motor Controller V2
WIP
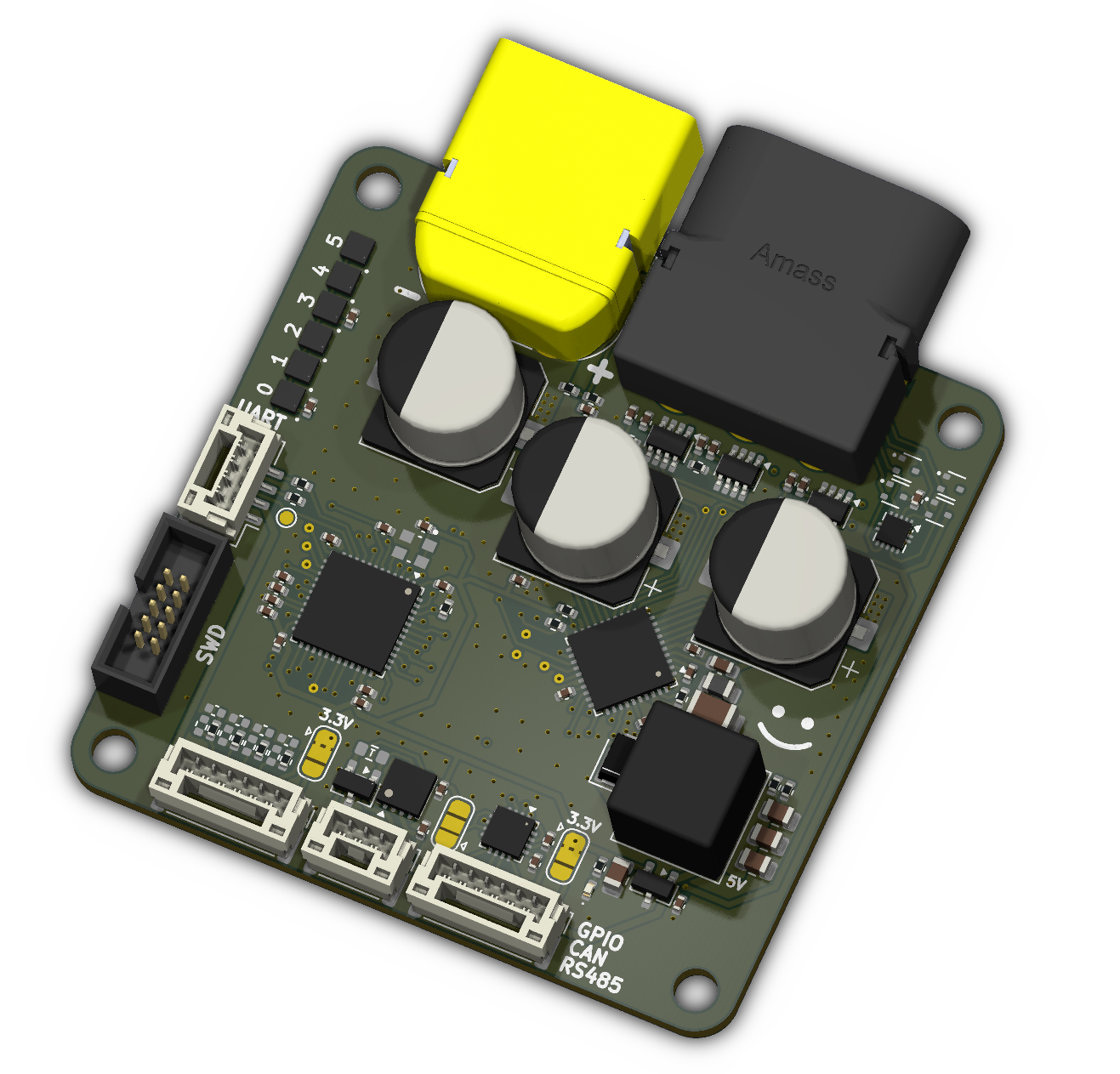
A second BLDC motor controller design aiming to fix some of the issues with my last design with more conservative specs and a more thorough design process. Using a similar DRV8320, NTTFSSCH1D3N04XL FETs, INA241 for inline current sensing, and a STM32G474 MCU. Aiming for operation at up to 24V 30A.
-
BLDC Motor Controller V1
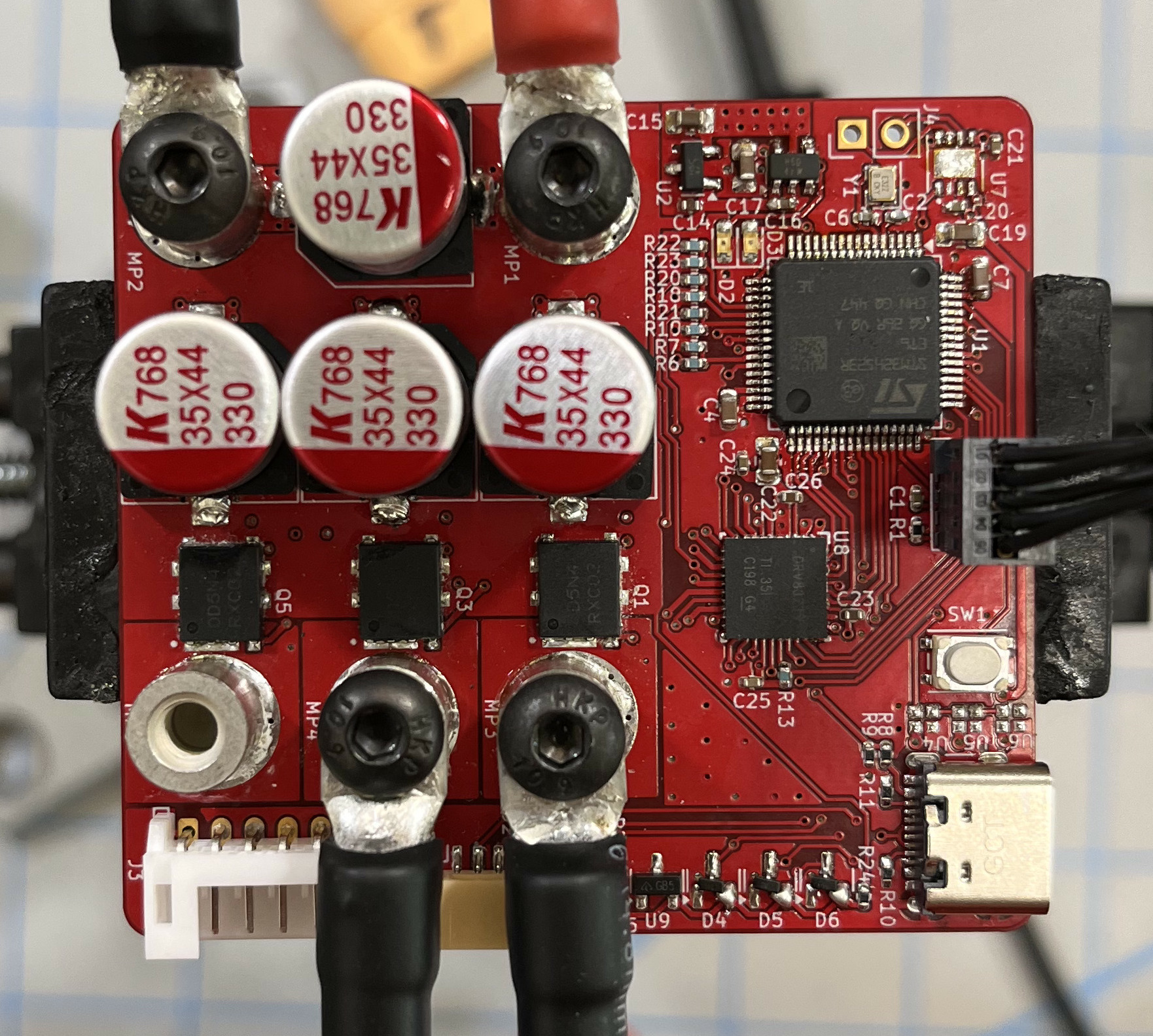
My first BLDC motor controller design, targeting 12V nominal operation and 40A peak current. Using the DRV8323 gate driver with integrated low-side current sensing, NTMFS0D5N04XMT1G FETs, and a STM32H523 MCU.
-
Differential Slider-Arm
WIP
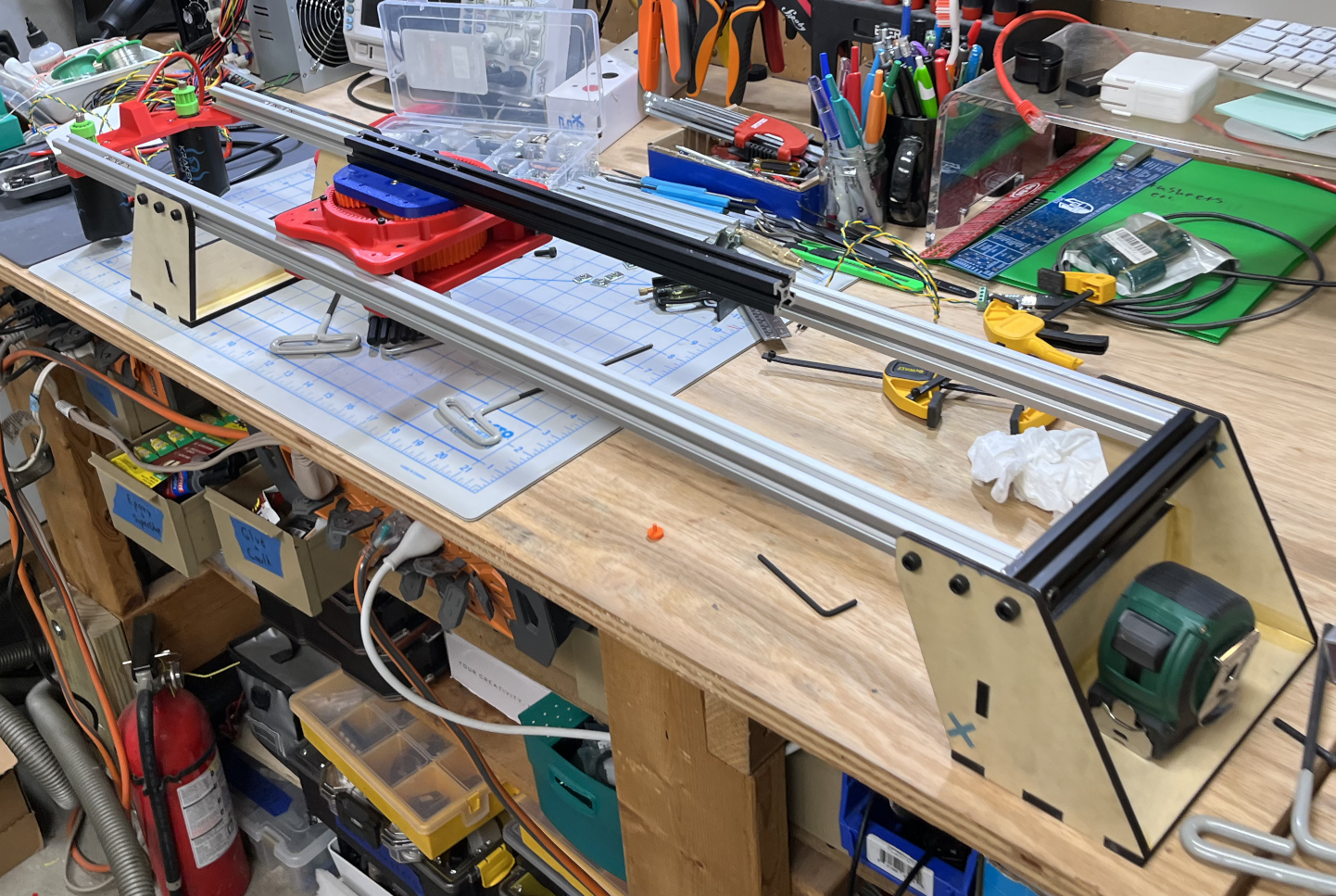
A lightweight differential mechanism I built to learn more about optimal control and system identification.
-
FPGA RISC-V SoC
WIP
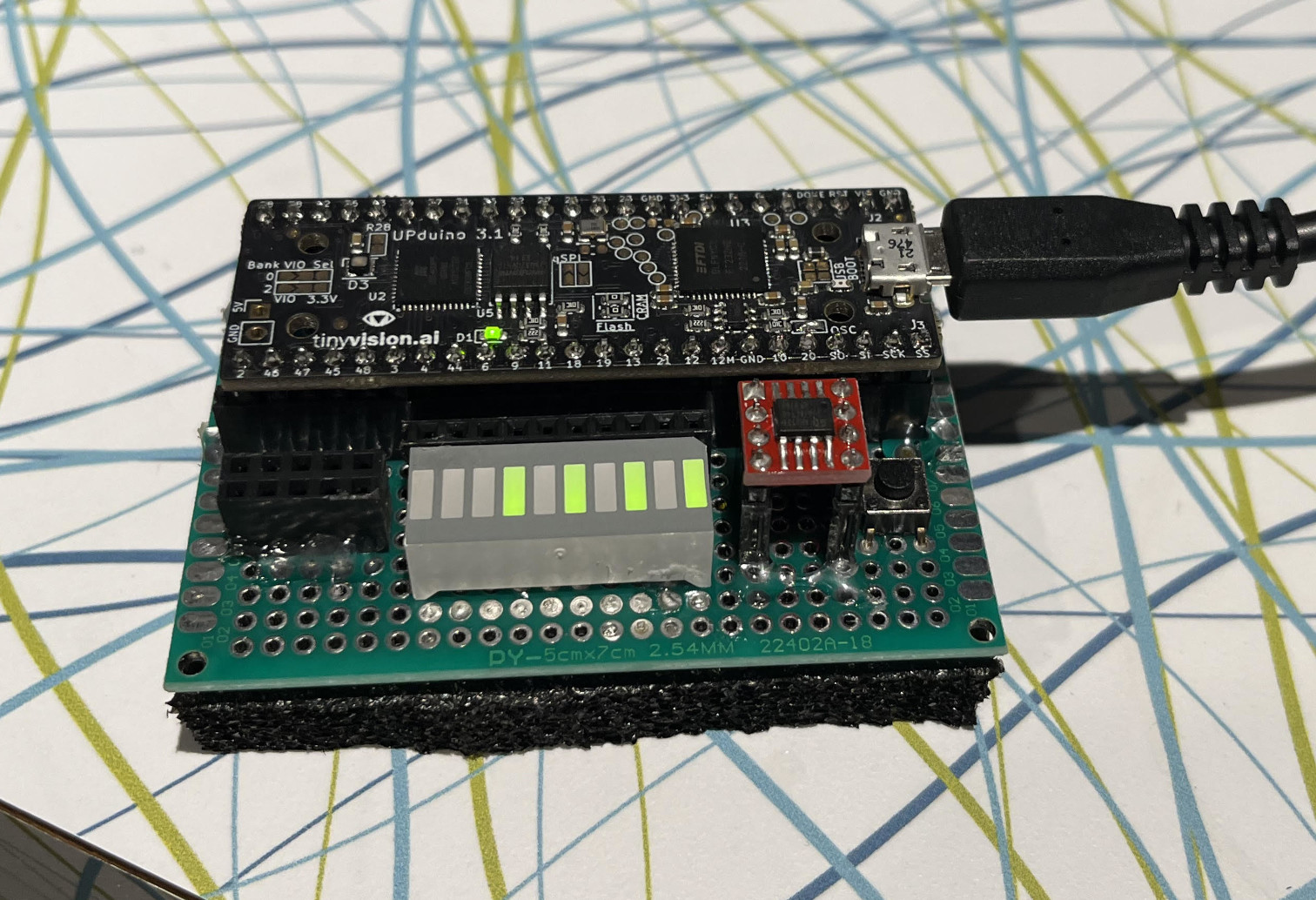
SoC design based on my own RISC-V rv32IM-compatible processor core with VGA graphics and other miscellaneous IO functionality TBD. Initially, I targeted the amazing Upduino’s ICE40UP5K FPGA, but in search of higher performance, I have pipelined my initial design and switched to using a ECP5 to allow for a more complex and optimized design with more FUNctionality.
-
TriangleBot V2
WIP
TriangleBot V2 is the second iteration of my holonomic-drive mobile robot base currently under development.
-
Rocket Tracker
A custom GPS tracking and telemetry device for use in high powered amateur rocketry using an ESP32-S3, GPS, LoRa radio, and a suite of other sensors.
-
Weed Spraying Rover
An off-road capable mobile robot with accessories for weedwacking and dispensing liquid weed killer controlled with ROS2.

-
Science Olympiad Robot Tour
This is the robot I built and programmed for my high school’s Science Olympiad team to compete in the Robot Tour event. We won second place in the state using this robot.
-
TriangleBot
An entirely custom-built triangular holonomic-drive robot using a Beaglebone Blue and the YARP robotics framework.
-
AoC Visualizations
Visualizations I have created for various Advent of Code problems that I have solved. Click for interactive JavaScript visualizations!
-
Photo Frame
Miniature 3D printed Mac-128K-shaped photo frame using an ATtiny84 and a small TFT screen that I built as a Mother’s Day present.

-
InCANceivable
InCANceivable is a framework for developing embedded microcontroller systems that interface with the CAN bus on FRC robots that I helped develop during the 2022 FRC season on team 2530 Inconceivable.

-
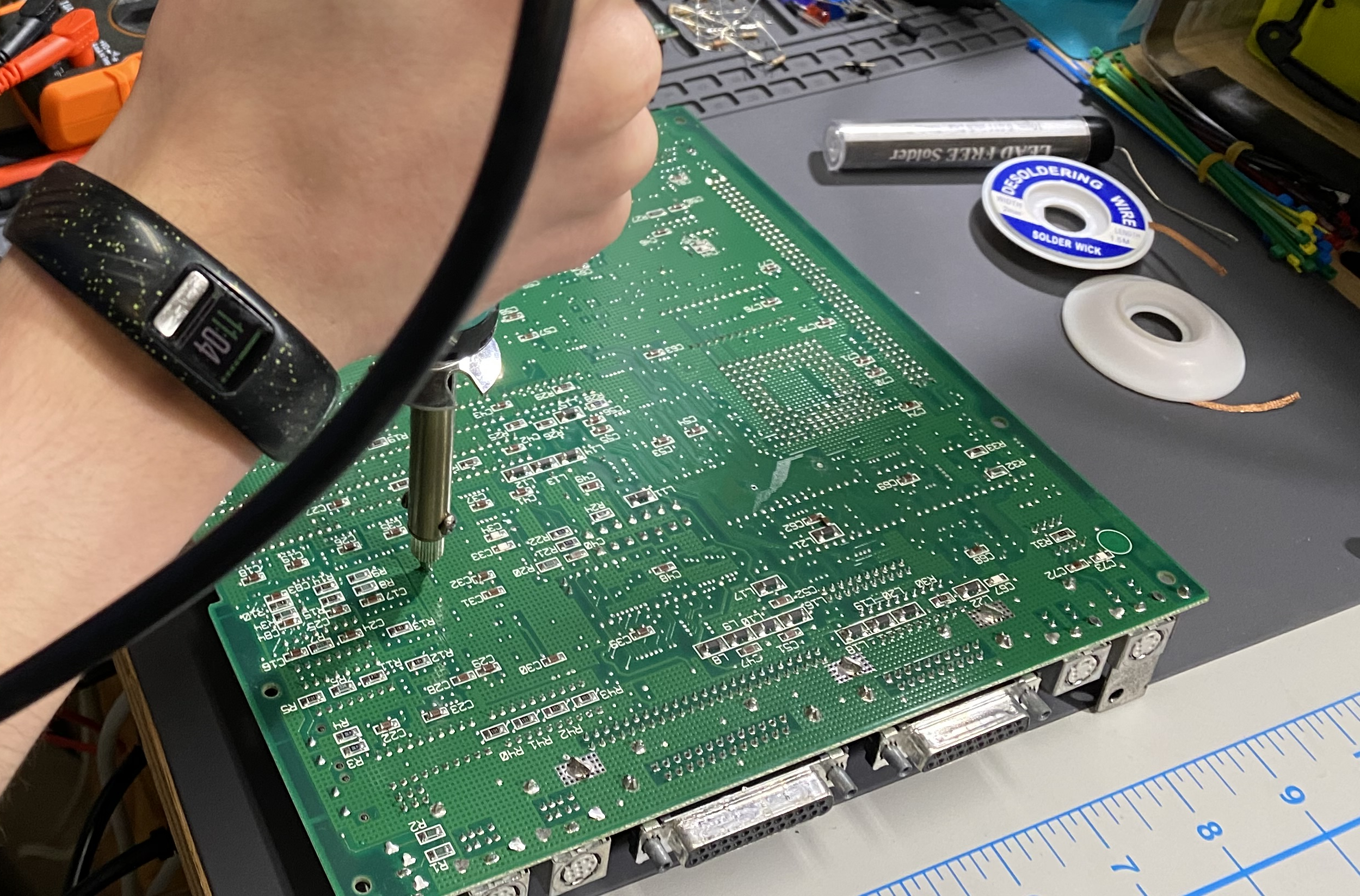
Mac 128K Memory Repair
I troubleshooted and fixed a Mac 128K computer’s RAM issues and created a custom tool to test the memory ICs along the way.
BLDC Motor Controller V2 WIP
A second BLDC motor controller design aiming to fix some of the issues with my last design with more conservative specs and a more thorough design process. Using a similar DRV8320, NTTFSSCH1D3N04XL FETs, INA241 for inline current sensing, and a STM32G474 MCU. Aiming for operation at up to 24V 30A.
BLDC Motor Controller V1
My first BLDC motor controller design, targeting 12V nominal operation and 40A peak current. Using the DRV8323 gate driver with integrated low-side current sensing, NTMFS0D5N04XMT1G FETs, and a STM32H523 MCU.
Differential Slider-Arm WIP
A lightweight differential mechanism I built to learn more about optimal control and system identification.
FPGA RISC-V SoC WIP
SoC design based on my own RISC-V rv32IM-compatible processor core with VGA graphics and other miscellaneous IO functionality TBD. Initially, I targeted the amazing Upduino’s ICE40UP5K FPGA, but in search of higher performance, I have pipelined my initial design and switched to using a ECP5 to allow for a more complex and optimized design with more FUNctionality.
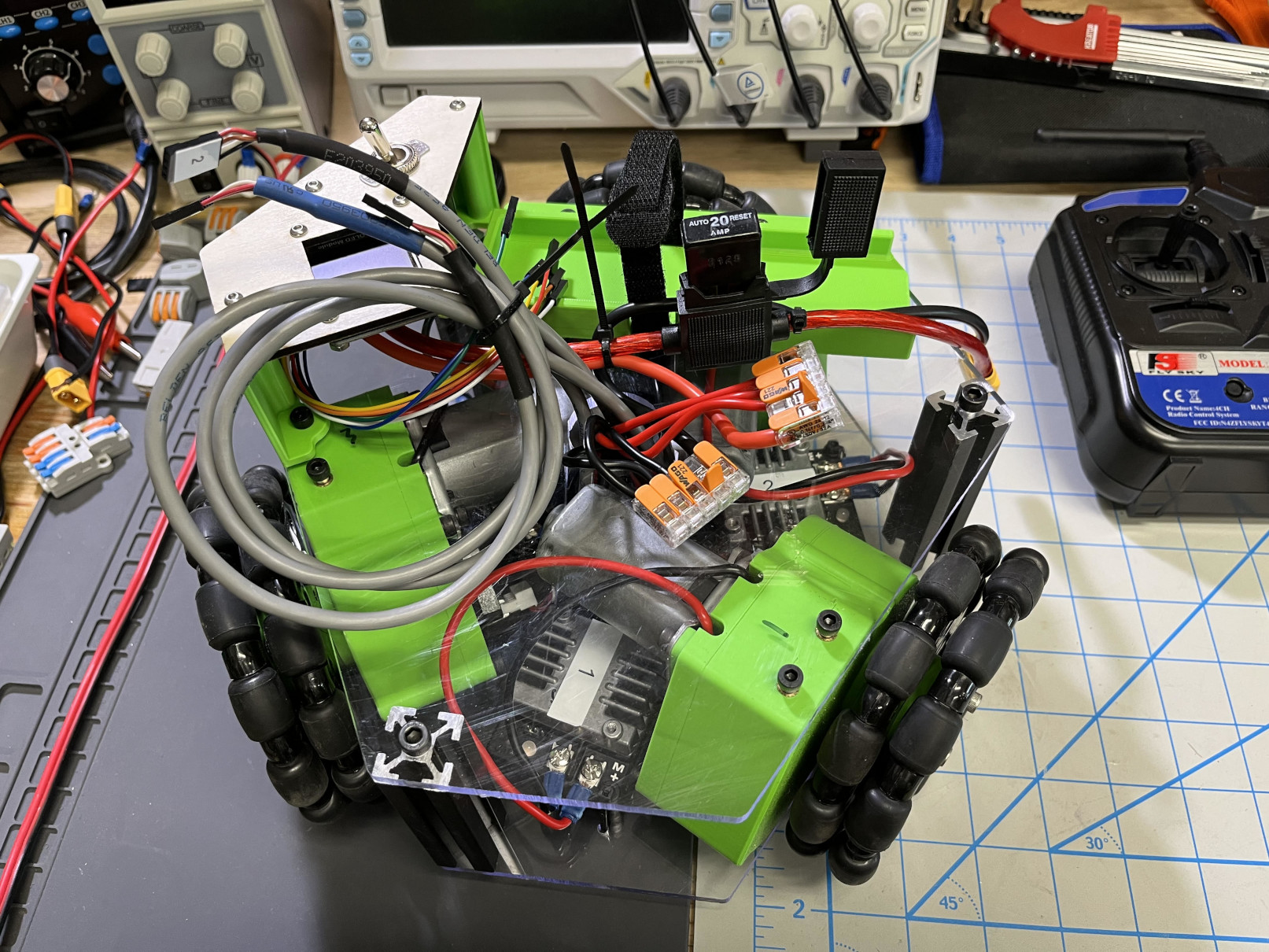
TriangleBot V2 WIP
TriangleBot V2 is the second iteration of my holonomic-drive mobile robot base currently under development.
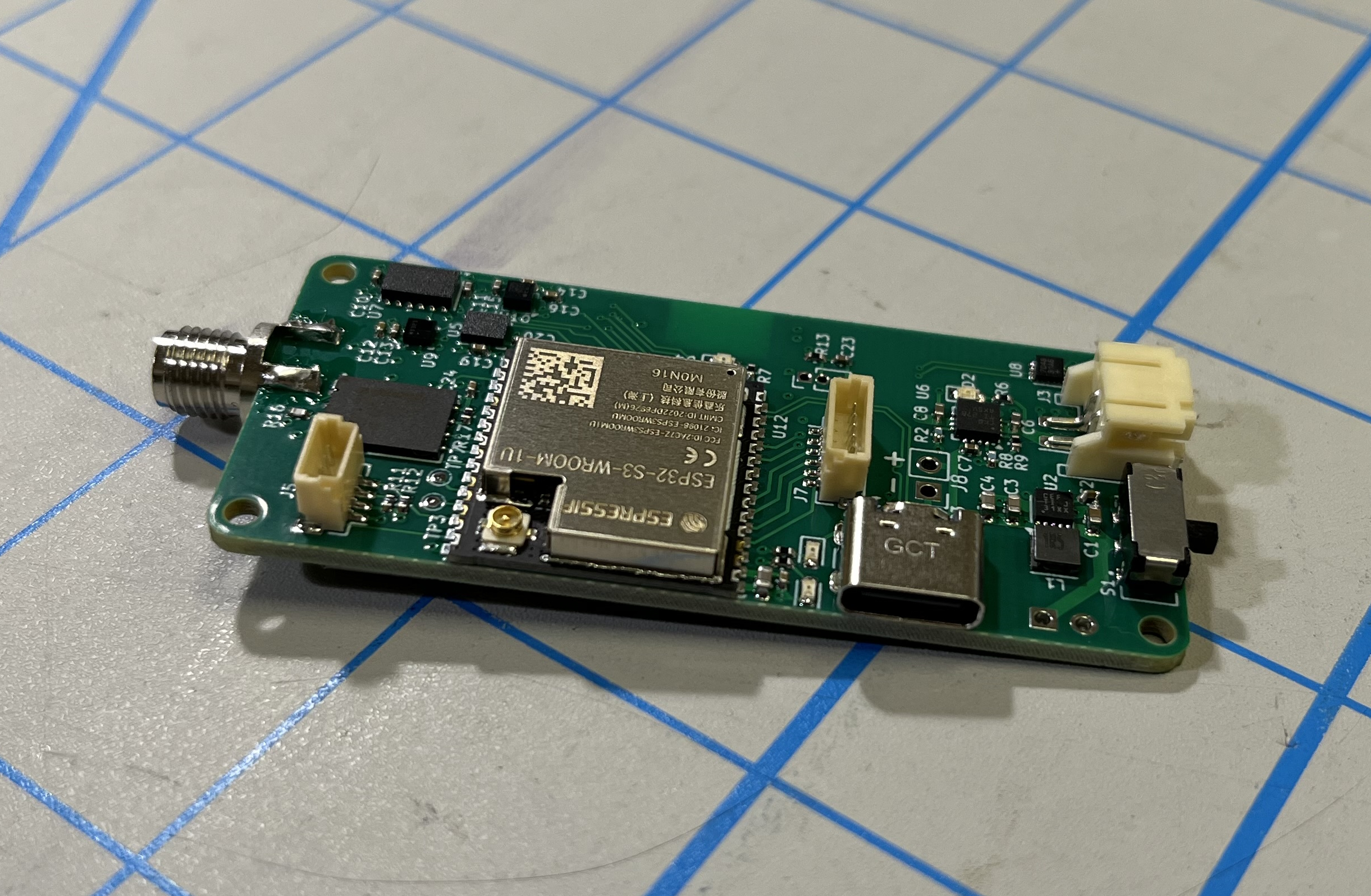
Rocket Tracker
A custom GPS tracking and telemetry device for use in high powered amateur rocketry using an ESP32-S3, GPS, LoRa radio, and a suite of other sensors.
Weed Spraying Rover
An off-road capable mobile robot with accessories for weedwacking and dispensing liquid weed killer controlled with ROS2.
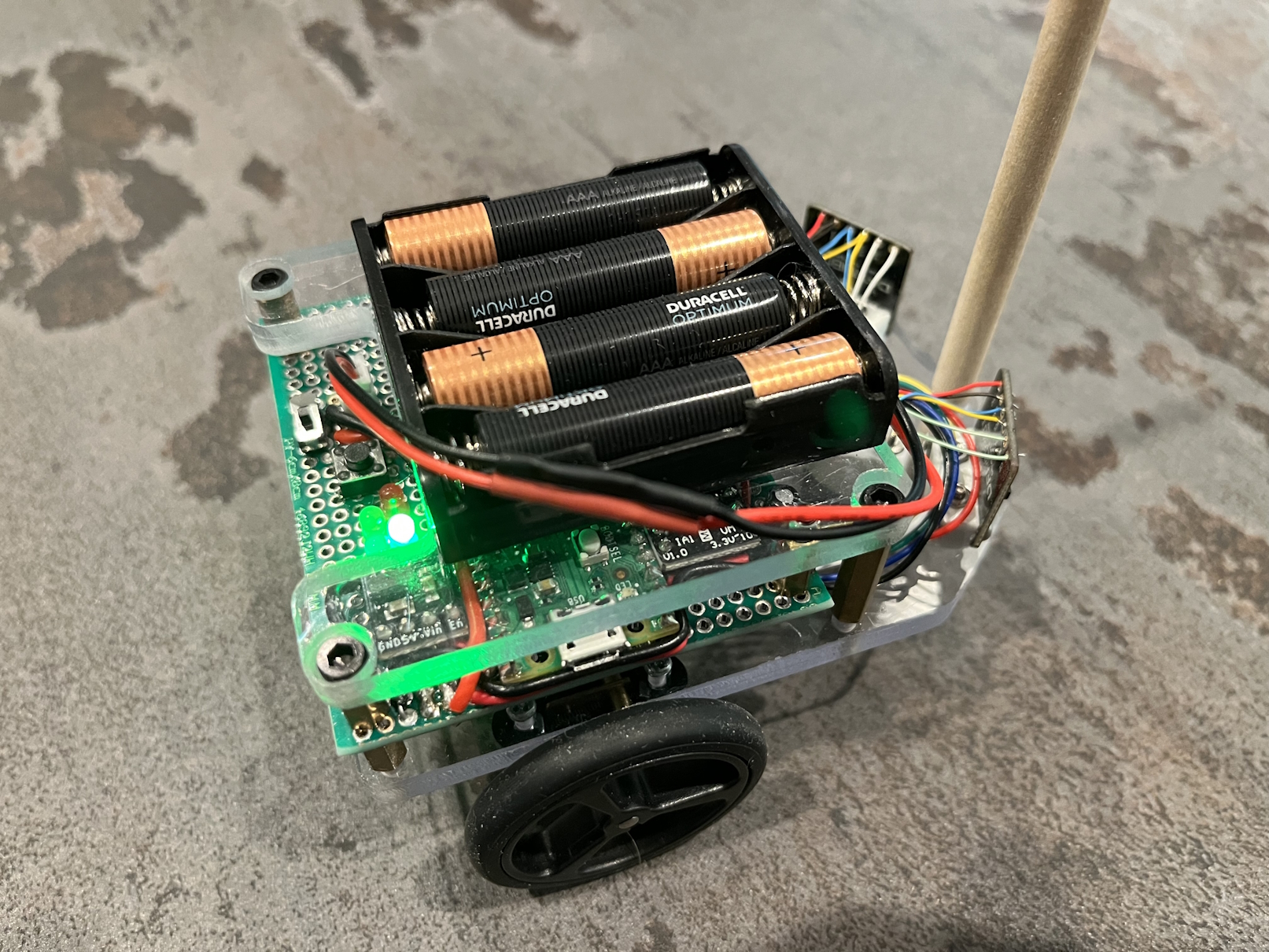
Science Olympiad Robot Tour
This is the robot I built and programmed for my high school’s Science Olympiad team to compete in the Robot Tour event. We won second place in the state using this robot.
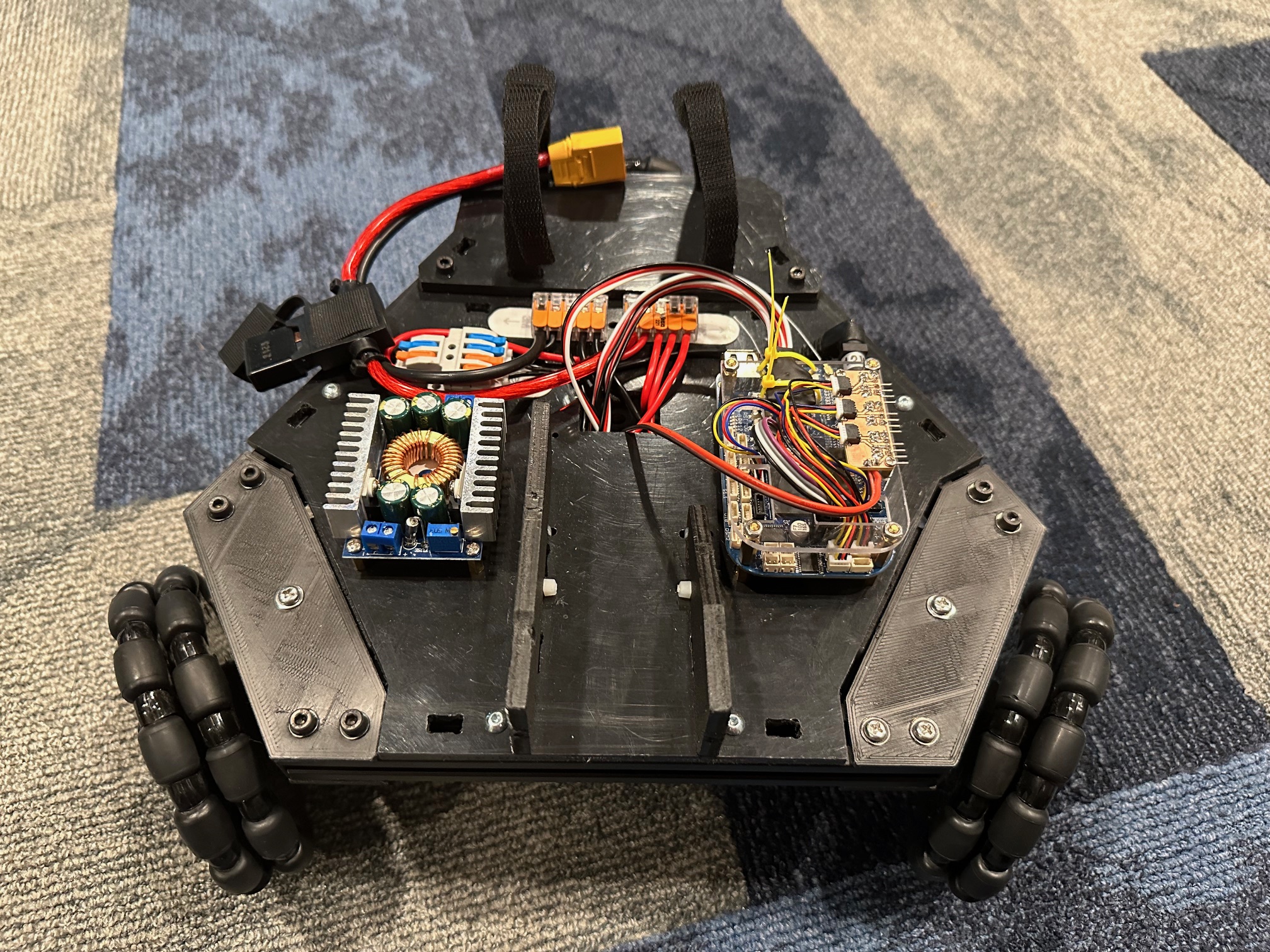
TriangleBot
An entirely custom-built triangular holonomic-drive robot using a Beaglebone Blue and the YARP robotics framework.
AoC Visualizations
Visualizations I have created for various Advent of Code problems that I have solved. Click for interactive JavaScript visualizations!
Photo Frame
Miniature 3D printed Mac-128K-shaped photo frame using an ATtiny84 and a small TFT screen that I built as a Mother’s Day present.
InCANceivable
InCANceivable is a framework for developing embedded microcontroller systems that interface with the CAN bus on FRC robots that I helped develop during the 2022 FRC season on team 2530 Inconceivable.
Mac 128K Memory Repair
I troubleshooted and fixed a Mac 128K computer’s RAM issues and created a custom tool to test the memory ICs along the way.